

🎧 Audio Shortcast
Isu pencemaran sungai dan perairan dalaman terus menjadi cabaran kritikal terhadap kelestarian alam sekitar serta keselamatan awam di Malaysia. Insiden pencemaran yang berulang bukan sahaja menjejaskan ekosistem akuatik, malah memberi kesan langsung kepada bekalan air, kesihatan komuniti dan tahap keyakinan masyarakat terhadap keberkesanan sistem pemantauan sedia ada.
Di sebalik laporan media yang sering memaparkan petugas lapangan lengkap bersut perlindungan dan bergantung kepada kaedah persampelan manual, timbul persoalan besar berkaitan keselamatan, kecekapan dan ketepatan pendekatan konvensional yang masih diamalkan. Daripada keperluan inilah tercetus satu inovasi berteraskan kejuruteraan marin dan teknologi pintar oleh penyelidik Universiti Teknologi Malaysia (UTM), yang dikenali sebagai AquaSURV.

AquaSURV merupakan sebuah kenderaan tanpa pemandu di permukaan air atau Unmanned Surface Vehicle yang dibangunkan oleh kumpulan penyelidik bersama pasukan pembantu jurutera di Pusat Teknologi Marin (MTC), UTM di bawah kepimpinan Ir. Dr. Nik Mohd Ridzuan Shaharuddin, Pengarah MTC UTM merangkap Pensyarah Kanan di Fakulti Kejuruteraan Mekanikal (FKM). Beliau melihat sistem tanpa pemandu dan autonomi sebagai penyelesaian kepada cabaran pemantauan alam sekitar yang semakin kompleks dan berisiko.
Menurut Ir. Dr. Nik Mohd Ridzuan, “AquaSURV dibangunkan sebagai respons kepada keperluan pemantauan kualiti air yang lebih cekap, selamat dan mampan, khususnya di perairan dalaman seperti sungai, tasik, empangan dan kawasan perindustrian yang berisiko tinggi.”
Kenyataan ini mencerminkan faktor utama pembangunan AquaSURV yang bukan sekadar bersifat teknikal, sebaliknya berakar daripada keprihatinan terhadap keselamatan manusia dan kelestarian alam sekitar.
Idea pembangunan AquaSURV tercetus daripada pemerhatian terhadap kaedah pemantauan sedia ada yang masih memerlukan pegawai turun secara langsung ke kawasan tercemar, ada kalanya dengan peralatan perlindungan khas. Proses ini bukan sahaja memakan masa dan kos yang tinggi, malah mendedahkan petugas kepada risiko kesihatan dan keselamatan, khususnya apabila melibatkan kawasan yang tercemar teruk.
Ir. Dr. Nik Mohd Ridzuan mengimbau antara detik awal cetusan idea tersebut dengan menyatakan, “Saya pernah melihat beberapa laporan akhbar beserta gambar yang menunjukkan pegawai memakai sut hazmat dan menggunakan galah panjang untuk mengambil sampel air tercemar. Pada ketika itu, saya menyedari wujudnya risiko keselamatan yang ketara dan keperluan untuk meneruskan pembangunan AquaSURV semakin jelas.”
Berbekalkan kepakaran UTM dalam reka bentuk bot kecil dan sistem marin, pasukan penyelidik melihat peluang untuk menterjemahkan ilmu tersebut kepada satu penyelesaian praktikal. AquaSURV kemudiannya dibangunkan sebagai platform tanpa pemandu yang mampu melaksanakan pemantauan secara jauh dan masa nyata, sekali gus meningkatkan kecekapan operasi serta menyokong pengurusan sumber air yang lebih sistematik dan berasaskan data.
Dari segi reka bentuk, AquaSURV menggunakan konfigurasi badan berkembar (catamaran) yang lebih stabil dan kukuh bagi memastikan operasi yang selamat dalam keadaan arus dan ombak yang rendah hingga sederhana. Reka bentuk ini membolehkan kenderaan membawa pelbagai peralatan pengesan tanpa menjejaskan kestabilan. Ia digerakkan oleh sistem pendorongan elektrik yang lebih mesra alam dan sesuai untuk operasi jangka panjang. Untuk versi saiz yang lebih besar, AquaSURV turut disokong oleh tenaga solar bagi meningkatkan kecekapan tenaga serta mengurangkan kebergantungan kepada sumber kuasa konvensional.


Keupayaan teknikal AquaSURV diperkukuh melalui integrasi pelbagai sensor kualiti air yang membolehkan pemantauan dijalankan secara langsung. Antara parameter yang boleh diukur termasuk pH, oksigen terlarut (DO), kekeruhan, suhu, kemasinan air serta pengesanan minyak. Selain itu, sistem ini juga berupaya menempatkan sensor tambahan seperti nitrat dan ammonia bergantung kepada keperluan kajian.
“Bergantung kepada integrasi sistem kawalan dan perancangan laluan, AquaSURV mampu bergerak pada jarak yang lebih jauh, mengumpul data secara masa nyata dan menghantar maklumat tersebut ke pusat kawalan untuk tujuan pemantauan dan analisis,” ujar Ir. Dr. Nik Mohd Ridzuan, menggambarkan keupayaan pintar yang menjadi teras kepada inovasi ini.
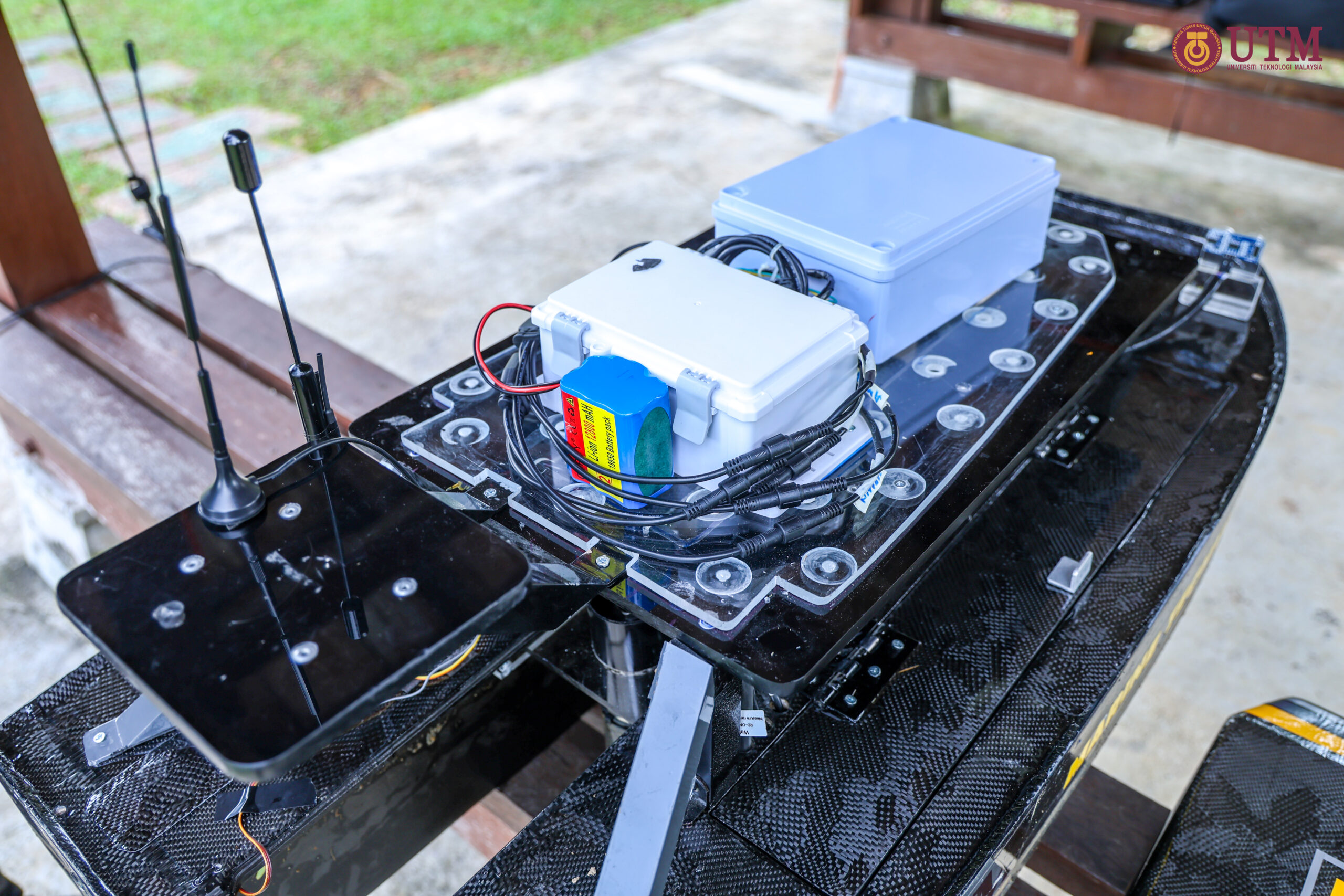
Keistimewaan AquaSURV tidak terhenti pada keupayaan pengumpulan data semata-mata. Sistem ini dilengkapi sambungan tanpa wayar 4G yang membolehkan data dihantar terus ke platform awan dan pusat kawalan untuk dianalisis dengan lebih pantas dan sistematik. Integrasi ini membuka ruang kepada pemantauan jarak jauh serta analisis data masa nyata, selari dengan keperluan pendigitalan dalam pengurusan sumber air masa kini.
Dari sudut spesifikasi teknikal, AquaSURV mempunyai panjang 1.12 meter, lebar 0.65 meter dan berat sesaran kira-kira 18 kilogram. Dengan kelajuan reka bentuk sehingga 3 knot, kenderaan ini cukup tangkas untuk melaksanakan pemantauan di pelbagai persekitaran perairan darat, sama ada bagi operasi rutin mahupun situasi kecemasan.
Pembangunan AquaSURV dilaksanakan secara berfasa dan sistematik, bermula daripada pengenalpastian masalah, diikuti proses reka bentuk badan dan sistem dorongan, integrasi sensor serta pembangunan sistem kawalan. Prototaip yang dihasilkan diuji terlebih dahulu di persekitaran terkawal sebelum menjalani ujian lapangan sebenar bagi menilai prestasi navigasi, kestabilan, kebolehpercayaan sistem dan ketepatan data.
Projek ini turut melibatkan gabungan kepakaran penyelidik dari FKM dan Fakulti Kejuruteraan Awam (FKA), dengan sokongan pembantu jurutera MTC serta pelajar pascasiswazah FKM.
Dalam usaha memperkukuh aplikasi di lapangan, AquaSURV turut dibangunkan melalui kerjasama strategik bersama pihak industri termasuk Omahams Corporation Sdn. Bhd. Kerjasama ini membolehkan teknologi yang dihasilkan lebih praktikal dan selari dengan keperluan pengguna akhir.

Menurut Ir. Dr. Nik Mohd Ridzuan, “Melalui pendekatan ini, AquaSURV bukan sahaja berfungsi sebagai platform penyelidikan, malah berpotensi diterjemahkan kepada penyelesaian sebenar yang boleh diguna pakai oleh agensi dan industri.”
Penyelidikan ini disokong melalui dana penyelidikan dalaman UTM Encouragement (UTMER) 2023 serta Innovation and Commercialisation Centre Prototype Development Fund 2 (ICC PDF2) 2025 yang berperanan sebagai input utama dalam pembangunan inovasi berasaskan penyelidikan. Hasil penyelidikan tersebut telah diterjemahkan kepada output inovasi yang dipamerkan di beberapa platform berprofil tinggi, termasuk reruai Kementerian Pendidikan Tinggi dan Kementerian Pertahanan sempena Pameran Antarabangsa Maritim dan Aeroangkasa Langkawi (LIMA) 2025, selain penyertaan dalam Putrajaya Festival of Ideas (FOI) 2024 secara fizikal dan Putrajaya FOI 2025 secara digital. Dari sudut pengiktirafan, inovasi ini turut dipertandingkan dalam Pameran Seni Industri dan Teknologi (INATEX) 2024 dan berjaya meraih Anugerah Perak. Pencapaian ini bukan sahaja meningkatkan keterlihatan hasil penyelidikan, malah mengukuhkan reputasi institusi serta memperluaskan potensi pemindahan teknologi dengan impak yang signifikan kepada industri dan kepentingan nasional.

Melangkah ke hadapan, AquaSURV dirancang untuk dipertingkatkan dengan elemen kecerdasan buatan, termasuk keupayaan mengelak halangan secara automatik menggunakan sensor ultrasonik. Potensi pengembangan aplikasinya juga merangkumi bidang hidrografi, termasuk pemetaan batimetri, operasi pencarian dan pertolongan, pemantauan keselamatan perairan negara serta sistem amaran awal. Dalam konteks Malaysia dan Asia Tenggara, AquaSURV berpotensi menjadi tulang belakang kepada pengurusan sumber air yang lebih mampan melalui penyediaan data yang kerap, tepat dan menyeluruh.
Secara keseluruhannya, AquaSURV mencerminkan komitmen UTM dalam menerajui penyelesaian lestari berteraskan teknologi, sekali gus membuktikan bahawa inovasi universiti mampu memberi impak nyata kepada kesejahteraan masyarakat dan kelestarian alam sekitar. Dengan menggabungkan kepakaran kejuruteraan, automasi, elektronik dan sains alam sekitar, AquaSURV bukan sekadar sebuah kenderaan tanpa pemandu, tetapi simbol anjakan paradigma dalam pemantauan kualiti air negara.
